
力控类
查看分类力控类
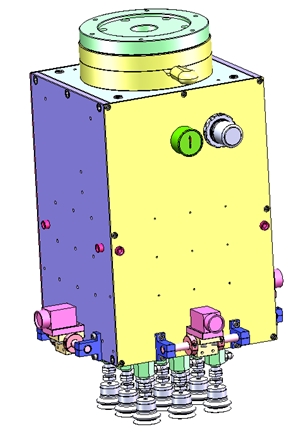
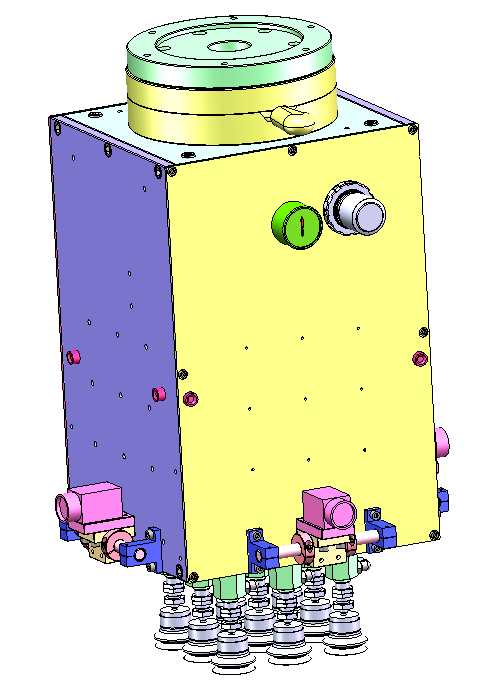
基于EtherCAT总线的空间点阵式柔性吸附抓取压紧模块
|
序号 |
指标描述 |
指标值 |
|
1 |
总体尺寸 |
260*260*520(长*宽*高) |
|
2 |
抓取负载 |
0-50KG |
|
3 |
吸附零件面积 |
200*200 |
|
4 |
吸附半径R |
0-350 |
|
5 |
自重 |
40KG |
|
6 |
吸附点 |
点阵:3*3=9 |
|
7 |
压紧工件力 |
0-300N可调 |
|
8 |
系统供电电压 |
24V |
|
9 |
功耗 |
50W |
产品特点
(1)系统供电电压24V;
(2)基于EhterCAT实时网络总线控制;
(3)3*3点阵三维力传感器、电机驱动器和机械结构集成一体化设计;
(4)柔性吸附,自动适应抓取(吸附)零件的外形;
(5)各运动轴带力传感器,可实现抓取后安放工件时压紧工件并可保持压紧力;
(6) 抓取前/后压紧工件力可调、可控;
(7) 实现力/位全闭环伺服控制;
(8)各轴所有电缆从结构内部布置,防止电缆拉拽和踩踏;
(9)结构为全封闭式,运动部件密封在结构内,防尘、防污染。
Copyright © 2021 南京讯登航天科技有限公司 版权所有
备案号:苏ICP备2021053638