
力控类
查看分类力控类
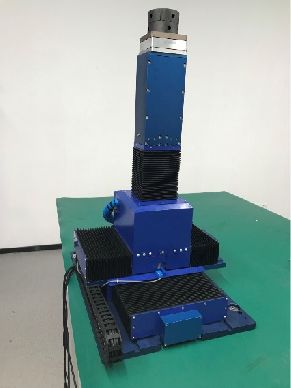
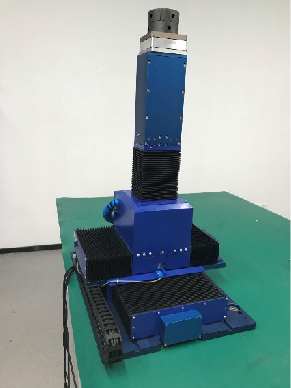
基于EtherCAT总线的XYZ向力位控制集成模块
|
序号 |
指标描述 |
指标值 |
|
1 |
总体尺寸 |
DW01:685*540*850(L*B*H), DW02:583*583*600 (L*B *H ), |
|
2 |
负载 |
80-120KG |
|
3 |
运动范围 |
X轴行程±170mm,Y轴行程±105mm; Z轴行程±85mm, |
|
4 |
运动速度 |
0-6mm/s |
|
5 |
三维(X\Y\Z)力控精度 |
1% |
|
6 |
末端单轴定位精度 |
优于0.01mm |
|
7 |
空间定位误差 |
小于0.02mm |
产品特点
(1)系统供电电压24V;
(2)EtherCAT实时网络总线控制;
(3)三维力传感器、电机驱动器和机械结构集成一体化设计;
(4)带三维力控和高精度位置控制;
(5)各轴所有电缆从结构内部布置,防止电缆拉拽和踩踏;
(6 ) 采用末端高精度编码器和电机侧编码器双闭环控制,获得高精度的末端定位;
(7)结构为全封闭式,采用螺母驱动外框运动,运动部件密封在结构内,防尘、防污染。
应用场景: 复杂零部件支撑和调姿
上一条:基于EtherCAT总线的空间点阵式柔性吸附抓取压紧模块
下一条:无
Copyright © 2021 南京讯登航天科技有限公司 版权所有
备案号:苏ICP备2021053638